
近日,来自燕山大学河北省并联机器人与机电系统重点实验室联合宁波职业技术学院宁波市适老化健康装备与服务技术重点实验室针对上肢外骨骼康复装置,提出了一种基于多目标优化的逆运动学建模和求解方法,提升了冗余上肢外骨骼机器人的运动质量和精度。相关成果发表在《Scientific Reports》上。
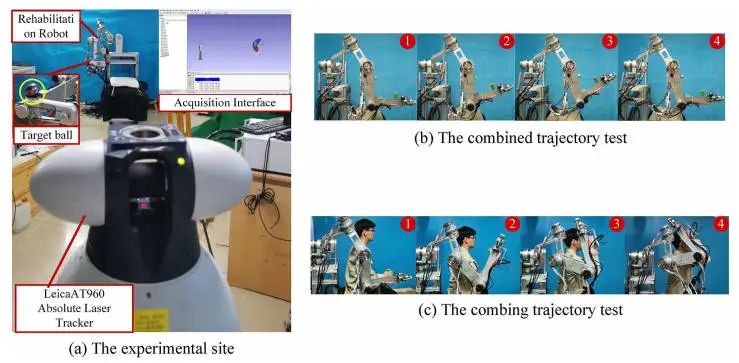
上肢外骨骼康复机器人在中风患者的康复训练中广泛应用,因其能够提供长时间且重复的康复训练,减轻医护人员的工作强度并提高工作效率。然而,由于上肢的结构复杂且灵活性高,许多机器人采用增加自由度的方法来提高系统灵活性和人机兼容性。这种高自由度设计虽然满足了不同患者的康复需求,但也导致在逆运动学求解中出现冗余解,从而使机器人运动难以精确匹配上肢的运动形态。因此,为冗余上肢外骨骼康复机器人建立一种更具人类运动特征且安全的逆运动学求解模型成为了一个重要课题。
本研究首先构建了一个多目标逆运动学求解模型,将终端位置精度、关节舒适度和系统能耗作为目标函数,同时添加了安全性和人类运动约束。该模型旨在使机器人的运动形态与人类上肢的运动尽可能一致,以实现更接近人类自然运动的康复效果。
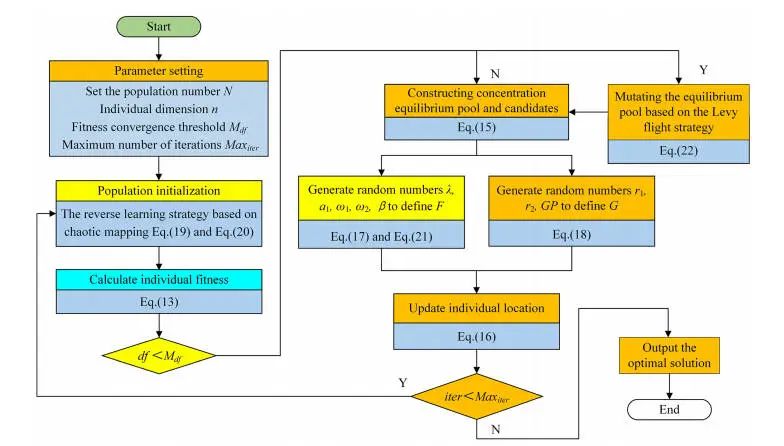
研究采用改进的平衡优化算法(IEO)来求解多目标优化问题。该算法引入了圆混沌映射、柔性惯性加权策略和Levy飞行变异策略,以提高初始解的多样性、全局搜索能力和避免局部最优的能力。
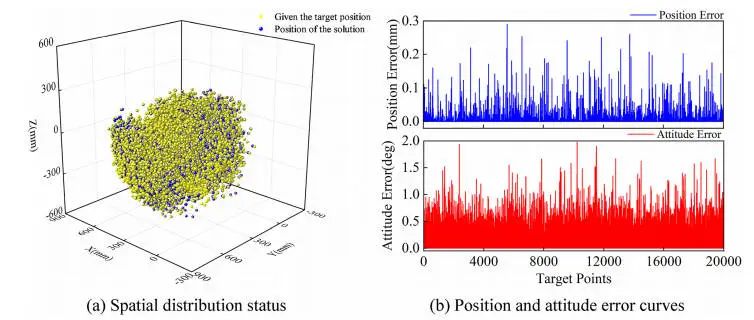
为验证模型的求解精度,研究使用了随机离散目标点进行测试,计算了机器人关节角度并与目标位置进行比对。结果表明,所提出的逆运动学模型能够准确地求解随机目标,误差较小,具有较高的精度和鲁棒性。
该研究在冗余机器人逆运动学求解领域具有重要的理论和应用价值。通过引入关节舒适度、能耗和人类运动约束等多目标优化,提升了冗余上肢外骨骼机器人的运动质量和精度,使其更接近人类的自然运动。该方法不仅有助于提高康复机器人的运动控制、轨迹规划和动态分析能力,还为未来在康复训练中实现更安全、更舒适的机器人运动提供了理论基础。
